从0到1手搓一个三维网格裁剪器
看到群友在群里问怎么用矢量面裁剪一个三角网,想着之前做过类似的功能,所以决定写一篇博客分享一下。代码是从0开始写的,算法实际上不难,但其实也还有一些特殊情况需要处理(文末附源码及测试数据下载地址)。
问题定义
假如有一个非常复杂的三维模型(比如一个建筑物的网格或地形网格),现在想用一个二维多边形把它"切"出来,只保留多边形内部或外部的部分。
简单来说就是:用2D多边形裁剪3D网格
问题看起来很简单,但实现起来有不少坑,尤其是一些特殊情况的处理。
核心算法:四步走
整个算法分为四个主要步骤:
第一步:找相交
首先要找出多边形的边和三维网格的三角形在哪里相交。
关键点: 我们实际上要找的是二维多边形和三角网在XOY面的投影,而不是三维空间中的线段。
优化点: 这里可以用AABB树来快速判断哪些线段和多边形相交(目前实现的版本没有用AABB树)
第二步:精确求交
粗筛找到相交对后需要精确求交,计算交点坐标。
特殊处理: 对垂直于XOY面的情况,可能需要翻转到YOZ或XOZ面。
属性处理: 如果需要对属性处理,这里求出来的交点可以计算在三角形内的权重。
数据存储: 求交后需要将相交信息保存起来,可以用map存储,方便后续约束剖分。
第三步:细分网格
处理上一步中得到的相交信息。
核心技术: 使用约束三角剖分,把相交点和线段、以及原始三角形作为约束条件,重新生成更细的三角形。
第四步:分类三角形并组装结果
现在每个三角形要么完全在多边形内部,要么完全在外部。
分类方法: 计算每个三角形的重心,然后判断这个重心是在多边形内还是外。
结果组装: 根据用户的需求(要内部、外部,还是两个都要),把对应的三角形组装成最终的网格。
最大的坑:投影退化问题
这是整个算法最核心的难点!
问题描述
假设你有一个垂直的三角形,如果你把它投影到水平面(XOY平面),它就变成了一条线段,面积为零。这时候和多边形求交就会出问题。
解决方案:智能投影平面选择
// 根据三角形法向量选择最佳投影平面
ProjectionPlane chooseBestProjectionPlane(const Triangle_3& triangle)
{
Vector_3 normal = CGAL::normal(triangle.vertex(0), triangle.vertex(1), triangle.vertex(2));
double abs_x = std::abs(normal.x());
double abs_y = std::abs(normal.y());
double abs_z = std::abs(normal.z());
// 选择法向量分量最大的方向对应的投影平面
if (abs_z >= abs_x && abs_z >= abs_y) {
return ProjectionPlane::XOY; // 投影到XOY平面
} else if (abs_y >= abs_x && abs_y >= abs_z) {
return ProjectionPlane::XOZ; // 投影到XOZ平面
} else {
return ProjectionPlane::YOZ; // 投影到YOZ平面
}
}
核心思想: 选择与三角形法向量最不平行的投影平面,确保投影后三角形不会退化成线段。
但即使这样还可能会有问题,比如下面这种情况:
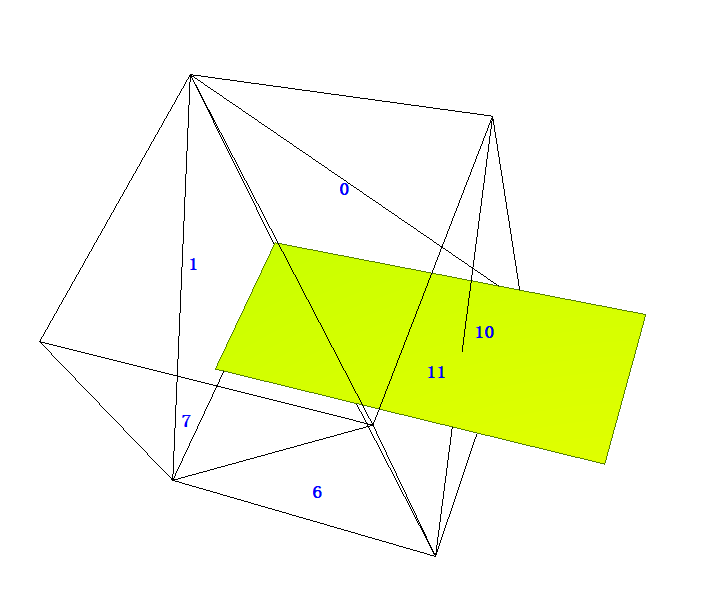
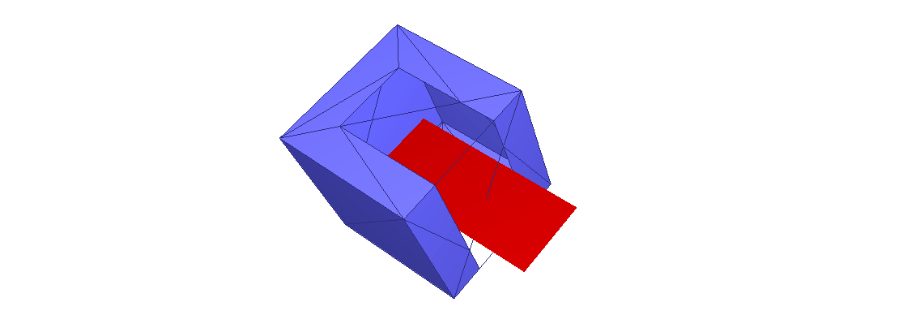
垂直三角形的特殊情况
特殊情况处理
三角形10、11垂直于XOY面,裁剪面的两条边垂直于两个三角形。
解决方案: 直接计算投影后的三角形与直线的交点,直线用点法式表示,点为投影后的点,法线为(0,1),最后将计算出来的交点插值到三维平面即可。
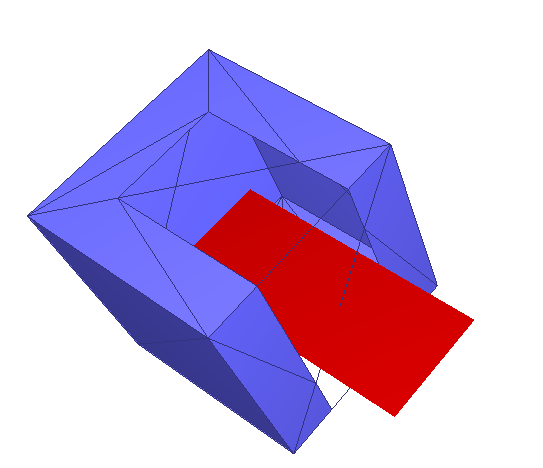
特殊情况裁剪效果
保留内部:
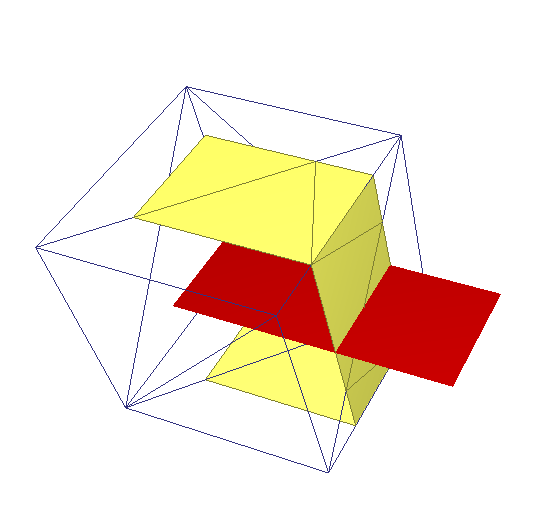
保留外部:
核心数据结构
为了让算法更清晰,我定义了几个关键的数据结构:
// 基础几何结构
struct Point {
double x, y, z;
}; // 简单三维点
struct Poly {
std::vector<Point> _points;
}; // 点串
struct Region {
std::vector<Poly> _regionPoints;
}; // 面,第一个是外边界,其余是洞
struct TriMesh {
std::vector<Point> _points; // 顶点
std::vector<int> _triangles; // 索引,每三个int表示一个三角形
}; // 简单三角网,后续可以根据需要扩展其他属性
// 三角形与线段相交信息结构
struct InterObject {
InterObjectType type; // 点或线段
Point_3 point1, point2;
// ... 各种辅助方法
};
这几个结构都是非常基础的,比较好理解,扩展起来也比较简单。
精度控制:选择合适的内核
CGAL提供了两种计算内核:
| 内核类型 | 特点 | 适用场景 |
|---|---|---|
Exact_predicates_inexact_constructions_kernel | 快但可能不准确 | 快速原型开发 |
Exact_predicates_exact_constructions_kernel | 慢但绝对准确 | 生产环境 |
我的选择
typedef CGAL::Exact_predicates_exact_constructions_kernel K;
原因: 虽然慢一点,但结果绝对可靠。
性能数据: 50万三角形 + 四边形裁剪面 = 18秒
注意:
Exact_predicates_inexact_constructions_kernel结果不对,所以没有记录时间。
效果展示
原始网格
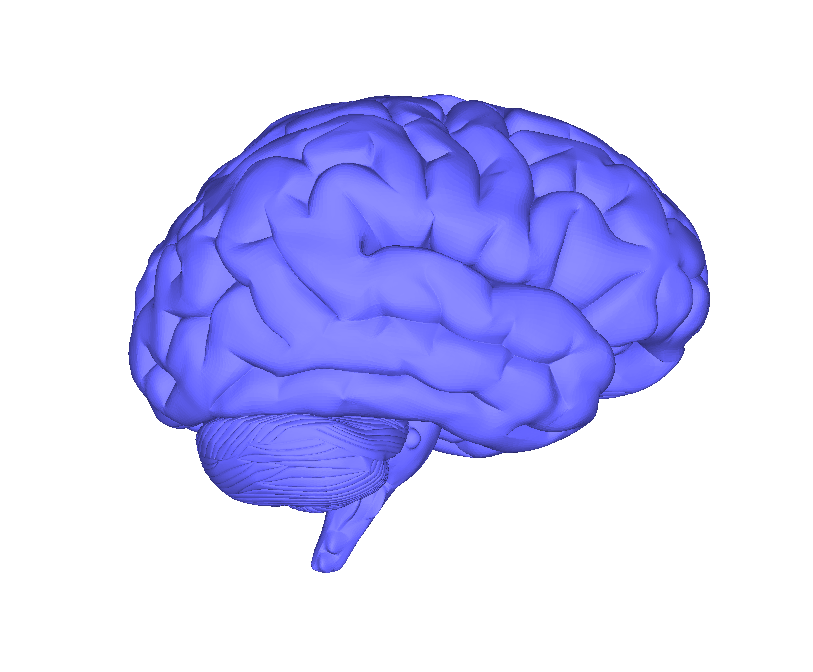
待裁剪的原始三维网格模型(大脑皮层)
裁剪多边形
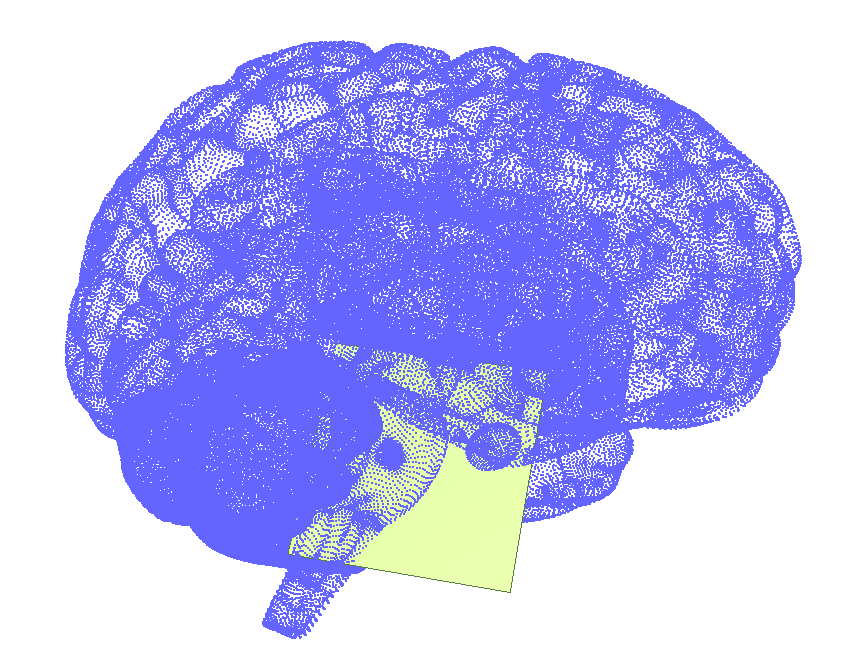
用于裁剪的二维多边形(支持带洞,但本例比较简单)
裁剪结果对比
保留内部:
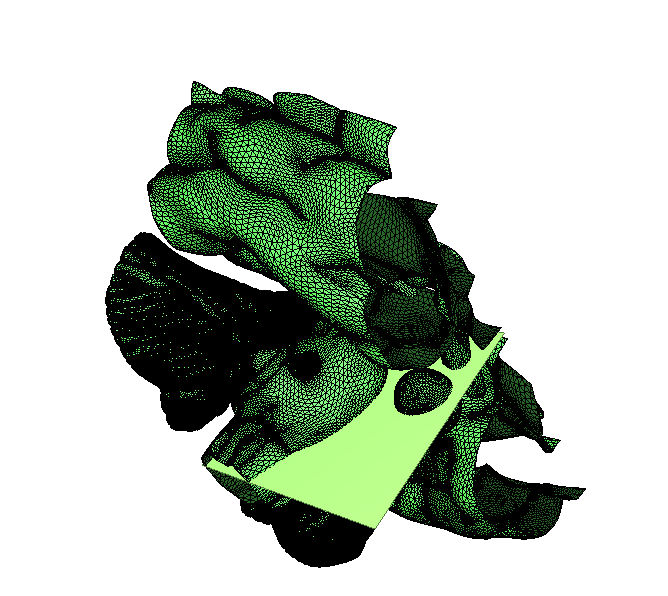
只保留多边形内部的网格
保留外部:
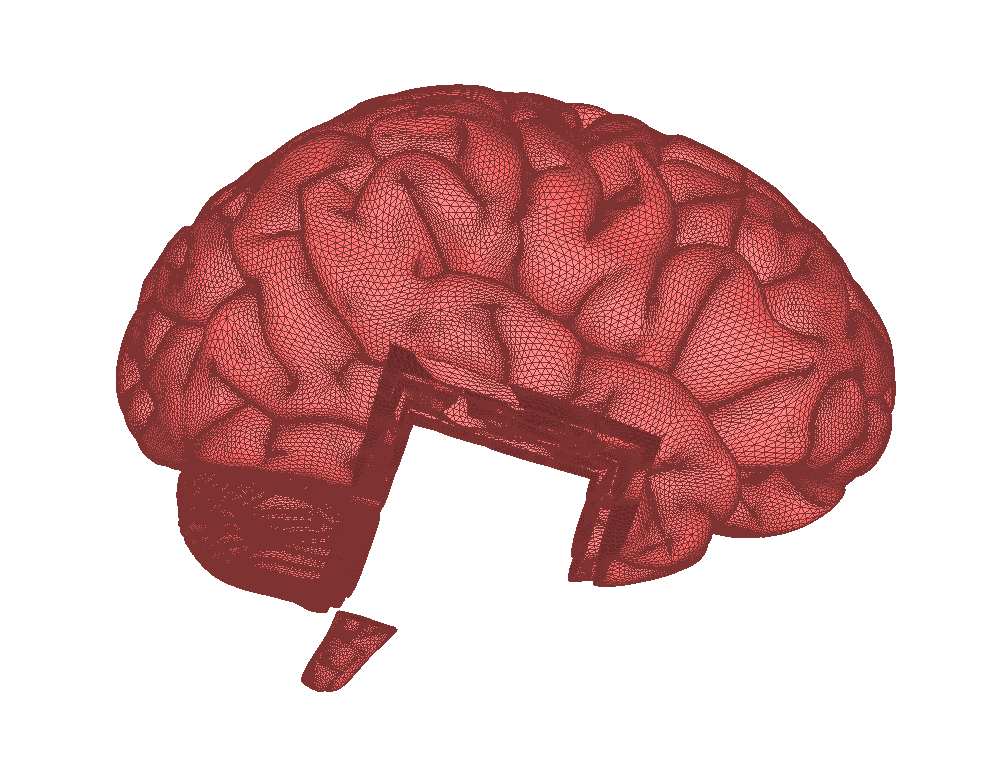
只保留多边形外部的网格
CGAL内核选择的重要性:精度对比实验
这里必须重点讲一下CGAL内核的选择,因为这直接影响到裁剪结果的正确性!
两种内核对比
快速内核(Exact_predicates_inexact_constructions_kernel)
- 优点: 计算速度快,内存占用少
- 缺点: 在复杂几何情况下可能产生错误结果
- 适用场景: 对精度要求不高的快速原型开发
精确内核(Exact_predicates_exact_constructions_kernel)
- 优点: 几何计算绝对精确,结果完全可靠
- 缺点: 计算速度较慢,内存占用较大
- 适用场景: 对精度要求极高的生产环境
实际对比测试
测试环境
- 网格: 复杂的大脑皮层模型(约50万个三角形)
- 裁剪多边形: 简单四边形
- 测试重点: 边界附近的细节处理
快速内核的结果
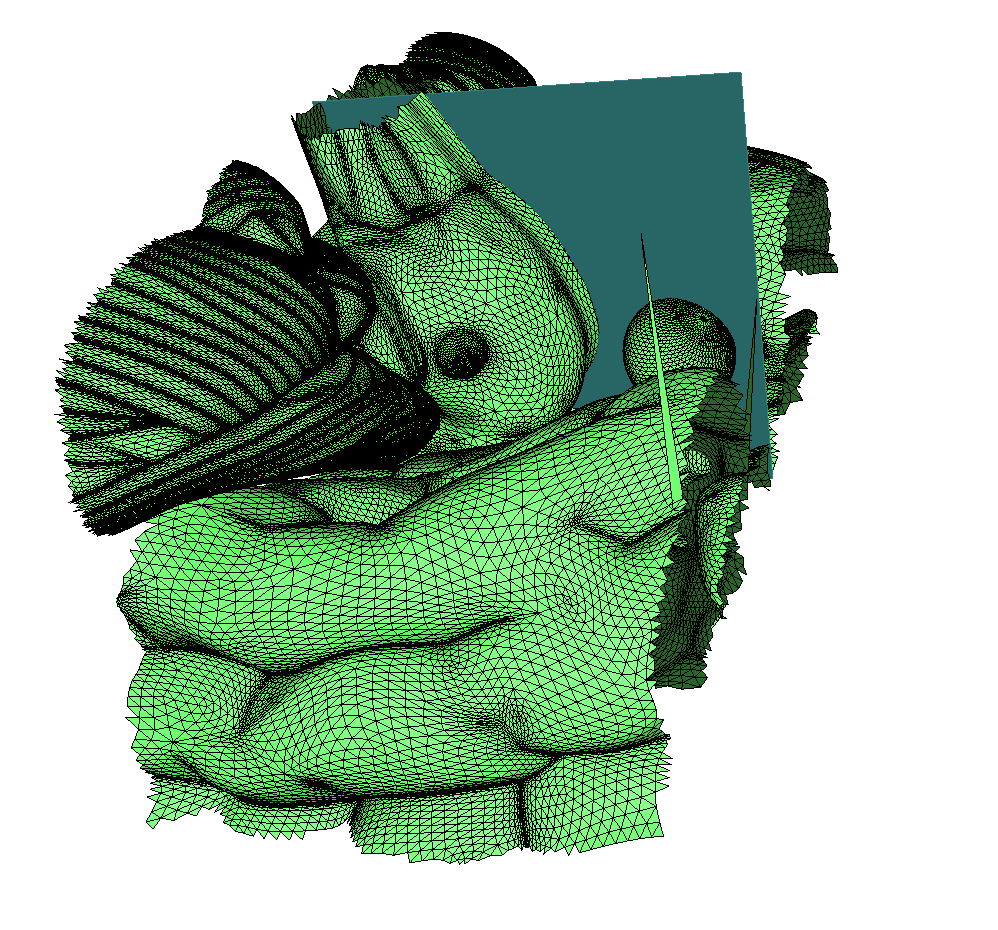
使用快速内核的裁剪结果
问题表现:
- 裁剪边缘锯齿严重
- 存在明显的几何错误
- 结果不可靠
精确内核的结果
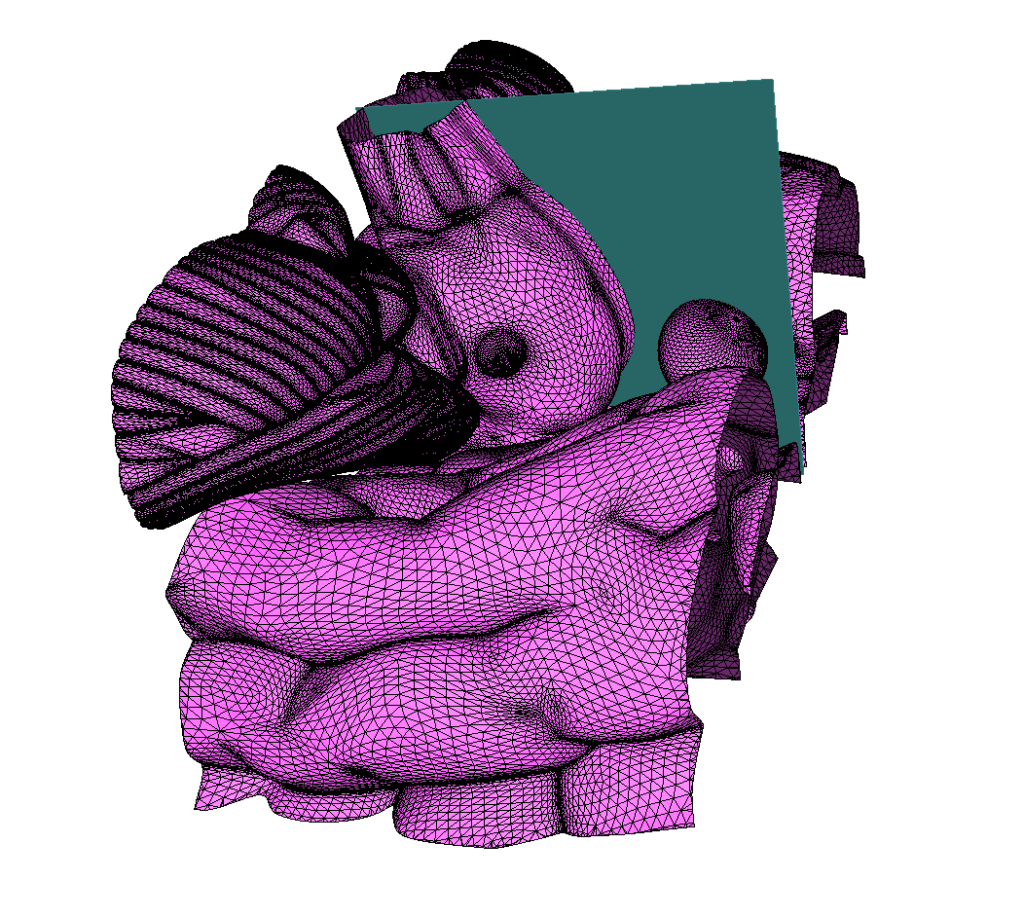
使用精确内核的裁剪结果
优势表现:
- 边界完美,赏心悦目
- 几何计算完全正确
- 结果完全可靠
性能对比总结
虽然精确内核比快速内核慢不少,但考虑到结果的正确性,在生产环境中必须使用精确内核。
优化空间: 目前算法没有经过任何优化,比如AABB树加速以及并行处理都没有使用,后续可以在这些方面进行性能优化。
测试数据及环境
- 测试数据: brain.off(大脑皮层模型,约50万三角形)
- 开发环境: Visual Studio 2022 + CGAL 5.6 + vcpkg
- 推荐内核:
Exact_predicates_exact_constructions_kernel - 性能: 50万三角形处理时间约18秒
总结
打个总结!
- 算法思路不难 - 四步走的流程很清晰
- 精度是关键 - CGAL内核的选择直接影响结果质量
- 特殊情况很重要 - 投影退化问题需要特殊处理加点小技巧
- 性能有优化空间 - 可以通过AABB树和并行处理提升速度
希望这篇分享对正在做类似工作的朋友有所帮助!
源码及测试数据下载地址:PolygonMeshClipper